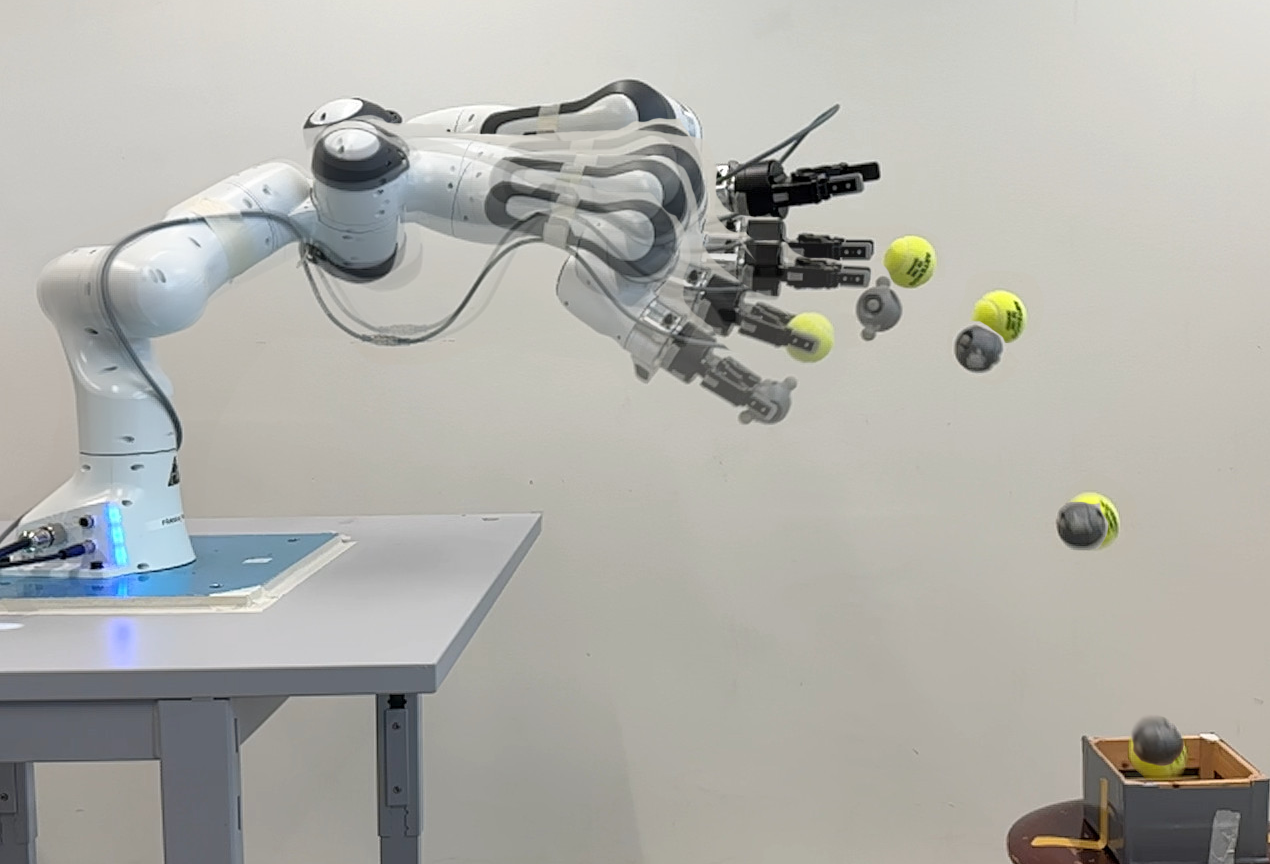
Learning Accurate Whole-body Throwing with High-frequency Residual Policy and Pullback Tube Acceleration
Yuntao Ma, Yang Liu, Kaixian Qu, and Marco Hutter
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025
This work presents a method for learning accurate whole-body throwing using high-frequency residual policy combined with pullback tube acceleration.

 A Solution to Adaptive Mobile Manipulator ThrowingIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
A Solution to Adaptive Mobile Manipulator ThrowingIEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022